







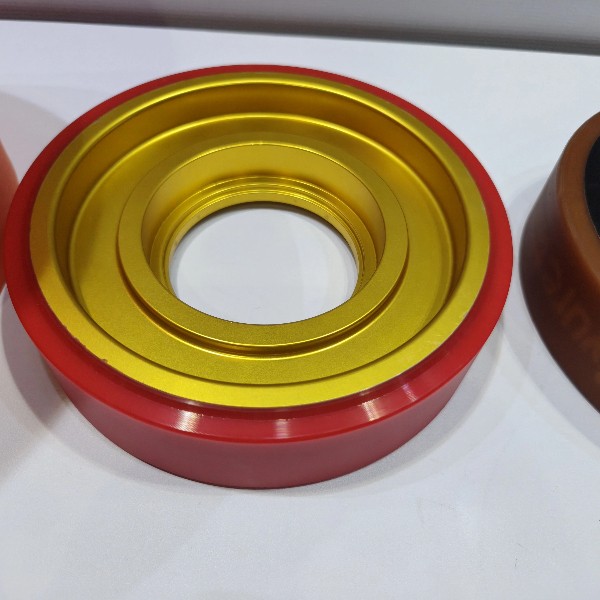
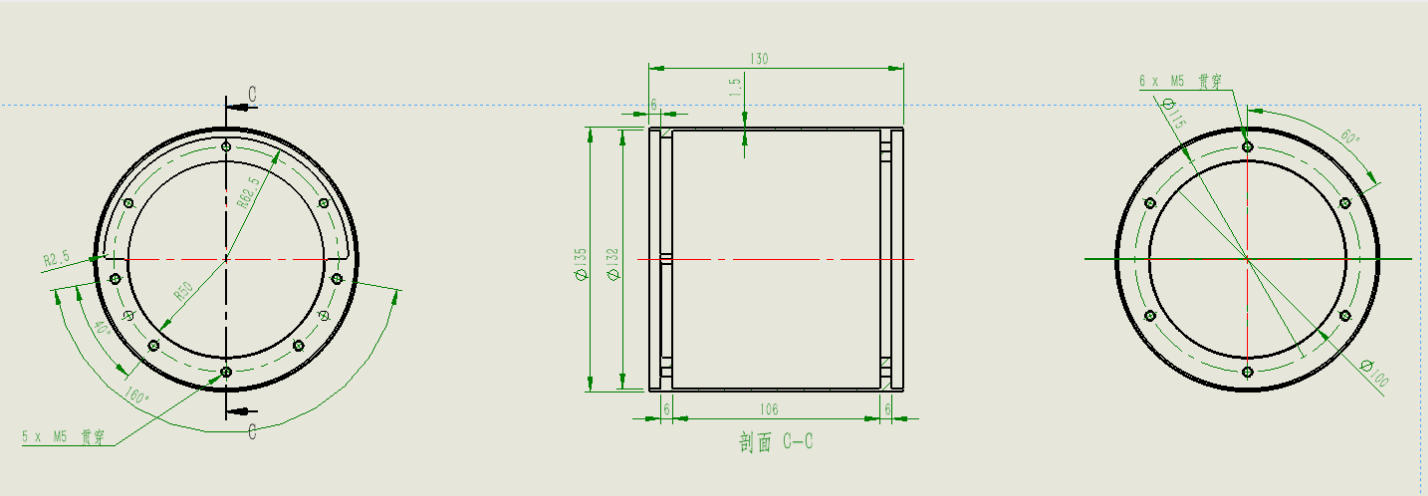
磁吸爬壁机器人铝合金包胶轮,直径135mm,采用2–4mm聚氨酯薄层设计,既保持永磁体吸附力,又具备缓冲形变,适应焊缝与凹凸面。轻量耐磨,摩擦力强,支持定制硬度与厚度,广泛应用于储罐检测、船体维护、桥梁检测等场景。
一、产品设计特点
1.1高精度铝合金轮芯
采用CNC加工成型,直径135mm,保证圆度与同心度,避免机器人在运行中出现抖动。
铝合金材质重量轻,能有效减轻整机负担,提高机器人在垂直和倒挂作业时的稳定性。
1.2薄层聚氨酯包胶
包胶厚度严格控制在 2–4mm,既能保持永磁体的吸附力,又能提供柔性缓冲。
聚氨酯硬度可定制在 Shore A 70–85,硬度过低会导致吸附不稳,过高则失去形变缓冲效果。
表面经过细致打磨或纹理设计,增加摩擦系数,确保在钢板、焊缝或涂漆面上具备良好的抓地力。
1.3磁力适配性优化
包胶工艺采用特种粘合剂与热浇注工艺,使胶层与铝合金牢固结合,不会因长时间磁吸负载而脱胶。
胶层薄而均匀,磁通量损耗控制在最低范围内,保证永磁体吸力最大化。
二、应用优势
2.1轻量化与承载力平衡
铝合金材质使单个轮子重量显著降低,但仍能承受机器人自身重量及操作过程中的冲击力,满足日常检测、清洗、喷涂等作业需求。
2.2适应复杂壁面环境
聚氨酯包胶具备一定形变能力,能够跨越焊缝、凹凸点或涂层不均的钢结构表面,减少卡顿和跳动,提升爬行连续性。
2.3保持强磁吸附力
包胶厚度和硬度经过优化设计,既能保证吸附力不被过多削弱,又能起到保护与缓冲作用,让机器人在大角度倾斜或倒挂作业时依然稳定。
2.4延长使用寿命
聚氨酯材料耐磨、耐老化,不易受潮湿、油污影响,大幅减少更换频率,降低维护成本。
2.5定制化服务
可根据不同型号磁吸机器人实际工况,提供直径、包胶厚度、硬度及表面摩擦力的定制方案,满足客户对稳定性与爬行效率的特殊需求。
三、应用案例场景
3.1储罐检测与维护
磁吸爬壁机器人在大型石化储罐、球罐外壁巡检时,铝合金包胶轮能稳定吸附并顺利越过焊缝与凹凸点,保证检测数据的连续性与准确性。
3.2船体维护与清洗
船舶外壳常年处于海洋环境,表面附着海生物或涂层不平整。聚氨酯包胶轮具备良好的摩擦力与耐海水腐蚀性能,使机器人能在湿滑金属壁面上稳定作业。
3.3钢结构桥梁检测
在高空或倒挂场景下作业时,薄层包胶轮既不影响磁吸附力,又能减少金属表面微小凸起对机器人运行的冲击,提升检测与维护作业的安全性。
3.4工业清洗与喷涂
在桥梁、储罐或管道外壁进行喷漆、喷砂、除锈时,定制化的轮子保证机器人移动稳定,避免因轮面打滑或吸附不足影响施工质量。
铝合金磁吸爬壁机器人轮面包胶可消除噪音,减轻震动,同时又不影响磁力吸附,确保安全高效工作。
菲尔森可定制不同轮径,不同厚度(≥2mm),不同硬度(50A-95D),不同性能的聚氨酯轮,欢迎联系我们获取报价和咨询。
 苏公网安备32098102321357号
苏公网安备32098102321357号